The Equations of Motion with Polar Coordinates
To finish our discussion of the equations of motion in two dimensions, we will examine Newton's Second law as it is applied to the polar coordinate system. In its basic form, Newton's Second Law states that the sum of the forces on a body will be equal to mass of that body times the rate of acceleration. For bodies in motion, we can write this relationship out as the equation of motion.
| \[\sum \vec{F}=m*\vec{a}\] |
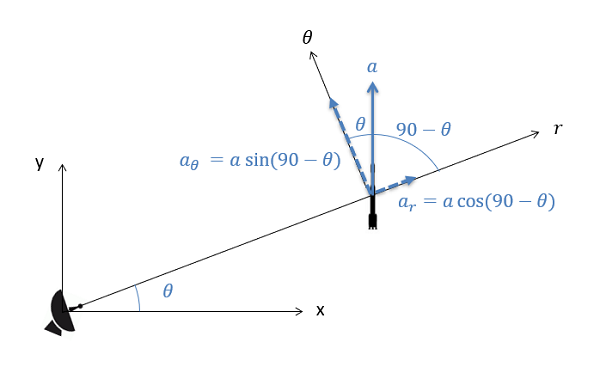
Just as we did with with rectangular and normal-tangential coordinates, we will break this single vector equation into two separate scalar equations. This involves identifying the r and theta directions and then using sines and cosines to break the given forces and accelerations down into components in those directions.
| \[\sum F_{r}=m*a_{r}\] |
| \[\sum F_{\theta}=m*a_{\theta}\] |
Just as with our other coordinate systems, the equations of motion are often used in conjunction with the kinematics equations, which relate positions, velocities and accelerations as discussed in the previous chapter. In particular, we will often substitute the known values below for the r and theta components for acceleration.
| \[a_{r}=\ddot{r}-r\dot{\Theta}^{2}\] |
| \[a_{\theta}=2\dot{r}\dot{\Theta}+r\ddot{\Theta}\] |
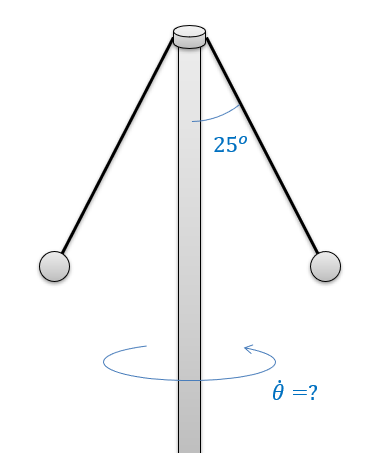
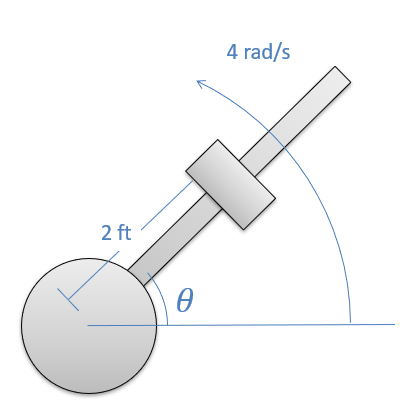
Polar coordinates can be used in any kinetics problem, however they work best with problems where there is a stationary body tracking some moving body (such as a radar dish) or there is a particle rotating around some fixed point. These equations will also come back into play when we start examining rigid body kinematics.