Relative Motion in Particles
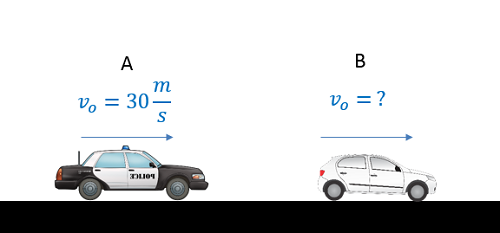
Relative motion analysis is the analysis of bodies where more than one body is in motion and we are in some way examining the motion of one moving particle relative to another moving particle. An example would be cars on a highway. If you are in one car moving down the highway with other cars moving down the highway with you, you will all have velocities in a single direction. From your perspective inside the car though, fast cars in front of you will appear to be moving away from you and slow cars in front of you will appear to be moving towards you. By knowing your speed, and by observing how fast the cars are moving away from you or towards you, you could determine, or at least estimate how fast these cars are going. The process of using your speed in conjunction with the relative velocities of the other cars to find the other cars' speed is relative motion analysis.
Relative Motion in One Dimension:
In a single dimension, we will usually have at least two moving particles as well as some fixed reference point. We usually call the fixed reference point O, and then label the other points A, B, and so on. In the diagram, below we can see an example of this, with a fixed reference point at O, a police car at A, and a speeding car at B.
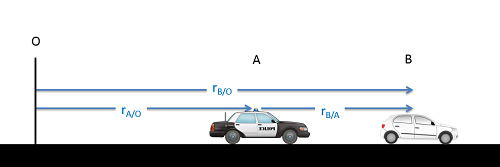
As we can see from the diagram above, the sum of the distance from O to A (rA/O) and the distance from A to B (rB/A) will be equal to the distance from O to B (rB/O). This gives us our position equation below.
| Position: | \[r_{B/O}=r_{A/O}+r_{B/A}\] |
|---|
One thing we should notice about the subscripts is that if we keep to our standard naming convention (point being observed / point we are observing from) then we should be able to see which points cancel out and which remain. In this case, the A's on the top and bottom on the right cancel out, leaving just a B on the top and an O on the bottom. This matches the subscript on the left of the equation.
Furthermore, we can take the derivative of this equation to relate velocities, or a double derivative to relate accelerations. This means that if we know any two of the terms in the equations below, we can solve for the third.
| Velocity: | \[v_{B/O}=v_{A/O}+v_{B/A}\] |
|---|---|
| Acceleration: | \[a_{B/O}=a_{A/O}+a_{B/A}\] |
Relative Motion in Two Dimensions:
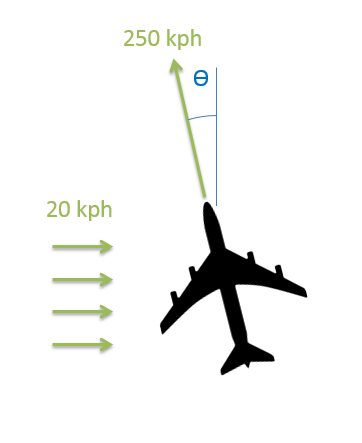
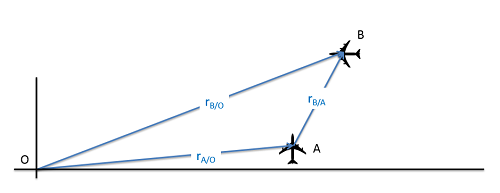
Just as with one dimension, we can start by examining a set of relative positions. In this case we will use the example of two planes moving through the sky. We may wish to deduce the position of plane B on a map, based on our observations from plane A. By using the information we have on our position relative to some set location, along with the relative position read in from on board instrumentation, we should be able to determine the absolute position (including an x and y coordinate) for plane B.
In two dimensions, we will use the same equations as before, except this time we will be using vectors rather than scalar values in our equations.
| Position: | \[\vec{r}_{B/O}=\vec{r}_{A/O}+\vec{r}_{B/A}\] |
|---|---|
| Velocity: | \[\vec{v}_{B/O}=\vec{v}_{A/O}+\vec{v}_{B/A}\] |
| Acceleration: | \[\vec{a}_{B/O}=\vec{a}_{A/O}+\vec{a}_{B/A}\] |
To solve these equations, we will almost always break the vector equations down into a set of component equations. This will let us solve these equations with simple algebra. Because we have more than one particle, we usually use rectangular coordinate systems for this with a universal set of x and y coordinates.